



国家自然科学基金项目
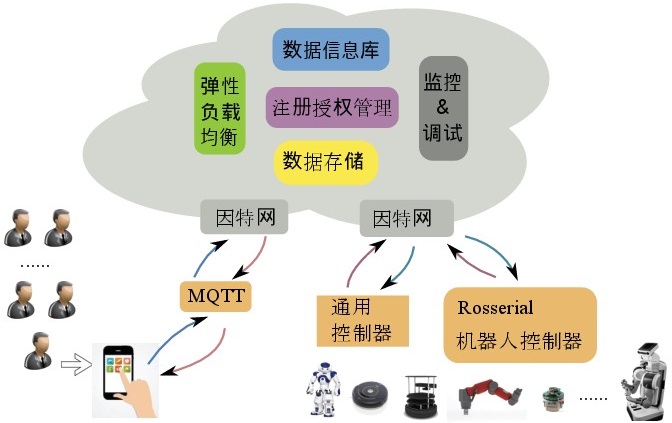
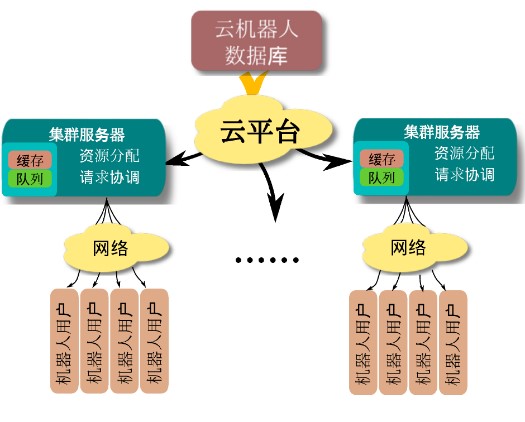
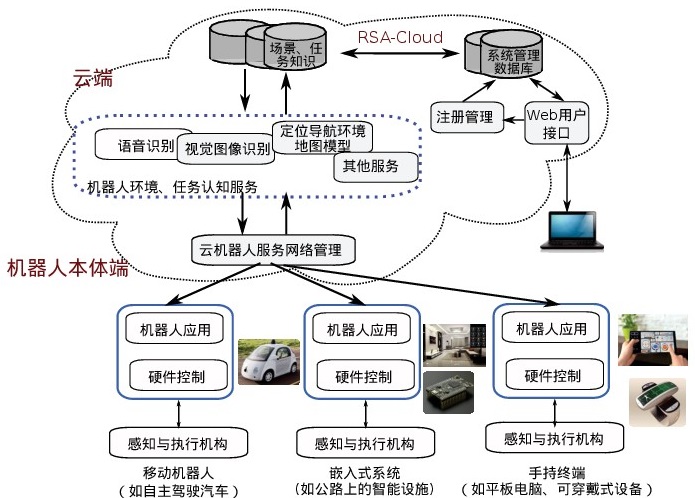
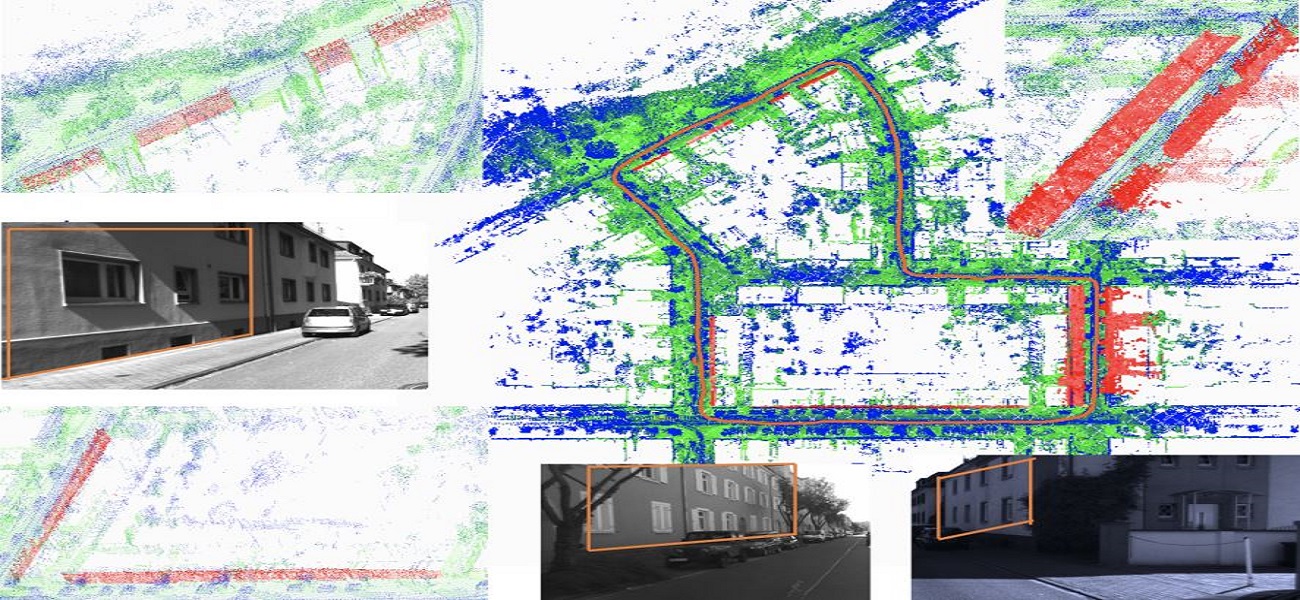
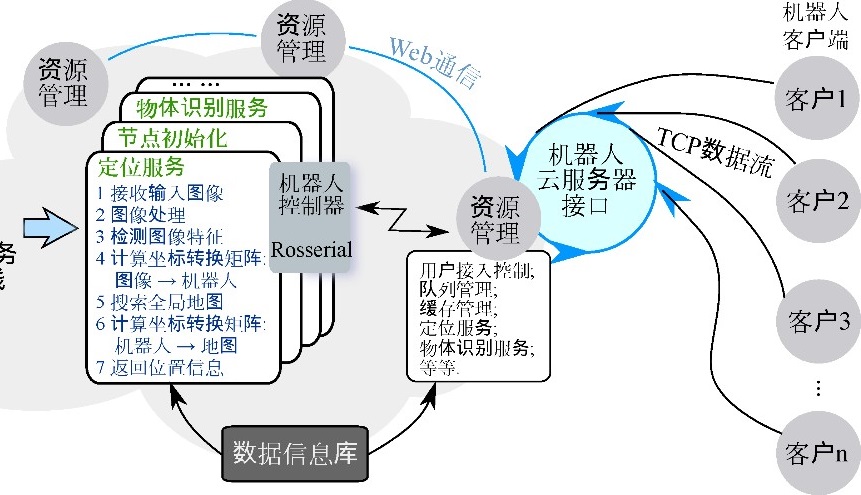
传统机器人在执行任务如即时定位与地图构建、物品抓取等任务时,大量环境感知数据的存储与计算对机器人硬件配置的要求越来越高, 实时执行尤其困难。云机器人不仅能够卸载复杂的计算任务到云端,而且可以共享云感知信息和技能。然而,由于缺乏建立智能的信息检索和资源配置决策的基础支撑平台,目前云机器人的研发还处于萌芽阶段。针对上述问题,本项目围绕动态异构的云机器人实时感知开展资源分配算法的研究工作, 主要目标包括:1) 针对云机器人的动态、异构的特性,基于图论和隐马尔可夫过程,提出实时感知场景下的动态资源供需模型;2) 研究面向云机器人实时感知系统的动态资源供需架构,基于竞价博弈的最优化方法,提出能够适应具有动态异构特性的资源配置算法.
read more